

Система телеметрии
Основное назначение научно-исследовательских судов проектов "Селена" и "Селена-М" - приём, первичная обработка и регистрация телеметрической информации с борта космического аппарата, находящегося на орбите Земли.
На этой странице вы можете ознакомиться с основными принципами работы и техническими данными телеметрических систем, использовавшихся в космической технике.
К сожалению, источник информации не помню.
МА-9МКТМ-4. Учебное пособие
В Руководстве приняты следующие сокращения:
| АКОТИ | автоматизированный комплекс обработки телеметрической информации |
| АНС | аппаратура нормализации сигнала |
| АПС | антенно-приемная система |
| АРУ | автоматическая регулировка усиления |
| АС | автосопровождение |
| АСПР | аппаратура синхронизации и первичной регистрации |
| АСУ | автоматизированная система управления |
| БВН | блок визуального наблюдения |
| В | канал с вертикальной поляризацией сигнала |
| ВИМ-АМ | времяимпульсная модуляция с амплитудной модуляцией ВЧ сигнала |
| ВП | воспроизведение информации |
| ВЧ | высокая частота, высокочастотный |
| ВШ | аппаратура ввода в широкополосный канал |
| Г | канал с горизонтальной поляризацией сигнала |
| ГГС | громкоговорящая связь |
| ГТС | групповой телеметрический сигнал |
| ГУ | графическое устройство |
| ЗАС | засекречивающая аппаратура связи |
| ЗИП | запасные части, инструменты и принадлежности |
| ЗУ | запоминающее устройство |
| ИТД | исходные технологические данные |
| ИЭ | инструкция по эксплуатации |
| КА | космический аппарат |
| КАО | комплекс автоматической обработки |
| КД | контактный датчик |
| КИА | контрольно-измерительная аппаратура |
| КИК | командно-измерительный комплекс |
| КИМ-А | кодово-импульсная модуляция с адресной структурой видеосигнала |
| КИМ-Ц | кодово-импульсная модуляция с циклической структурой видеосигнала |
| КИМ-ЧМ | кодово-импульсная модуляция с частотной манипуляцией высокочастотного сигнала |
| КС | командное слово |
| КСВ | коэффициент стоячей волны |
| МЗУ | магнитное запоминающее устройство |
| МЛК | маркер локального коммутатора |
| МОЗУ | магнитное оперативное запоминающее устройство |
| МОК | маркер основного коммутатора |
| МПУ | малогабаритное печатающее устройство |
| НАКУ | наземный автоматизированный комплекс управления |
| НИП | наземный измерительный пункт |
| НОВ | начало отсчета времени |
| НП | непосредственная передача |
| НЧ | низкая частота, низкочастотный |
| ОК | основной коммутатор |
| ОПУ | опорно-поворотное устройство |
| ПКУ | программно-коммутирующее устройство |
| ПП СЕВ ВТ | приемный пункт службы единого времени высокой точности |
| ПП ТМИ | полный поток телеметрической информации |
| РТС-9 | радиотелеметрическая система |
| СЕВ | служба единого времени |
| СОИ | система обработки информации |
| СЭС | система электроснабжения |
| ТМ | телеметрия, телеметрический |
| ТМИ | телеметрическая информация |
| ТО | техническое обслуживание |
| ТТД | тактико-технические данные |
| ТЭЗ | типовой элемент замены |
| УВД | устройство выдачи данных |
| ФСУ | фотосчитывающее устройство |
| ЦУ | целеуказания |
| ЭВМ | электронная вычислительная машина |
| ЭМУ | электро-машинный усилитель |
| ЭХБИ | электрохимическая бумага, импульсная |
1. НАЗНАЧЕНИЕ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ МА-9МКТМ-4
1.1. Назначение, состав и место МА-9МКТМ-4 в НАКУ
Аппаратура телеметрического комплекса МА-9МКТМ-4 является составной частью наземного автоматизированного комплекса управления космическими аппаратами и предназначена для приема, магнитной и графической регистрации телеметрической информации, выдачи её на аппаратуру автоматизированной обработки или через аппаратуру сопряжения в широкополосный канал связи.
Аппаратура МА-9МКТМ-4 обеспечивает прием и преобразование сигналов ТМ информации от бортовых устройств типа "Трал", имеющую аналоговую радиолинию с модуляцией ВИМ-АМ, бортовых устройств системы РТС-9 типа БР-17, БР-92 и др., использующих аналоговые методы передачи и модуляцию ВИМ-АМ и типа БР-91Ц1, БР-93, ТА-926, ТА-932, ТА-937 и др., использующих цифровые методы передачи с модуляцией КИМ - ЧМ.
В состав МА-9МКТМ-4 входят (рис.1) антенно-приемная система Б-529М и две унифицированные радиотелеметрические станции УРТС-2, связанные с Б-529М через коммутирующее устройство ТУ‑640.
В АПС Б-529 входят:
а) антенная установка CM-178 в составе:
- системы зеркал СБ-1;
- высокочастотных мостовых схем формирования диаграммы направленности Б-557;
- опорно-поворотного устройства CM-175;
- программного устройства "Аккорд" (два комплекта);
- пульта СБ-3606 и системы управления ОПУ СМ-175;
б) приемно-пеленгационная аппаратура TУ-544 в составе:
- приемной системы метрового диапазона волн ПМ-1 (2 комплекта);
- приемной системы дециметрового диапазона волн ПД-1-11-3 (2 комплекта);
- аппаратура автосопровождения;
- аппаратуры размножения ТМ видеосигналов ТУ-569 (2 комплекса);
- панорамных приемников ТУ-513 (4 комплекта);
- аппаратуры преобразования аналоговой информации собственных параметров системы в цифровую ТУ-620;
в) имитатор высокочастотных сигналов ИМД-1;
- сборно-разборная юстировочная вышка "Унжа-2" с контрольными антеннами.
В УРТС-2 входят:
аппаратура синхронизации и первичной регистрации ТУ-621 и МЗУ 17C06-07;
- аппаратура нормализации сигнала ТУ-630М2;
- аппаратура графической регистрации ГУ-1 (2 комплекта);
- аппаратура цифропечати ТУ-633М и МПУ-16-2;
- пульт управления и контроля ТУ-627;
- блок визуального наблюдения ТУ-626М;
- перфонабиваталь ТУ-744.
На комплекс МА-9МКТМ-4 и его составные части установлены следующие индексы ГРАУ:
- МА-9МКТМ-4 - 17Н98
- УРТС-2 - 17Н99
- Аккорд - 17H913
- Б-529М - 17H914
- ТУ-544 - 17H915
Антенно-приемная система Б-529М предназначена для приема и выделения сигналов телеметрической информации в режиме ручного и программного управления, а также автосопровождения КА по принимаемому сигналу.

рис. 1. Структурные схемы телеметрической радиолинии и ТМ комплекса МА-9МКТМ-4
Система выполнена по двухканальной схеме, обеспечивающей поляризационно-разнесенный прием сигналов горизонтальной и вертикальной поляризации в метровом и дециметровом диапазоне волн с последующим сложением сигналов и автоматической выдачей телеметрического видеосигнала из канала с лучшим отношением сигнал/шум. В системе предусмотрен визуальный контроль радиообстановки в полосе рабочих частот.
Связь системы Б-529М с УРТС-2 осуществляется через коммутационное устройство ТУ-640, которое обеспечивает коммутацию цепей выбора рабочего диапазона частот, управление цепями индикации режимов работы и выдачу групповых телеметрических видеосигналов на входы УРТС‑2. Управление коммутационным устройством осуществляется вручную или командами с пульта управления станции УРТС-2.
Станция УРТС-2 обеспечивает преобразование групповых телеметрических сигналов, регистрацию (магнитную, графическую и цифропечать) и визуальное отображение телеметрической информации. Результаты телеизмерений могут быть выданы в аппаратуру обработки и трансляции КАО и в широкополосную линию связи (через аппаратуру ВШК – ТУ-647 или ТУ 622-06) непосредственно в сеансе связи или при воспроизведении телеметрической информации по окончании сеанса связи. В процессе приема информации осуществляется оперативный контроль за её достоверностью и привязка к сигналам бортового и наземного времени.
Наличие двух комплектов УРТС-2 в составе МА-9МКТМ-4 обеспечивает возможность приема информации в дециметровом диапазоне волн одновременно на двух рабочих частотах, а при работе на одной частоте повышает надежность получения информации.
1.2. Основные характеристика и режимы работы аппаратуры
Приемно-регистрирующая аппаратура МА-9МКТМ-4 обеспечивает:
1.2.1. Прием и преобразование радиосигналов системы РТС-9 с модуляцией ВИМ-АМ и КИМ-ЧМ на 39 частотах метрового диапазона, 48 частотах первого дециметрового диапазона и 88 частотах второго дециметрового диапазона волн и на 3-х частотах с модуляцией ВИМ-АМ метрового диапазона волн системы "Трал" при информативностях, соответствующих данным таблицы 1.
Таблица 1
| Режим работы |
Вид модуляции |
Информативность |
| РТС-9ВИМ |
ВИМ-АМ |
25600, 12800, 6400, 3200 изм/сек. |
| РТС-9КИМ-Ц | КИМ-ЧМ | 521000, 256000, 128000, 64000, 32000, 16000, 8000, 4000, 2000, 1000, 500 бит/сек. |
| РТС-9КИМ-А | КИМ-ЧМ | 256000, 128000, 64000, 32000, 16000, 8000, 4000, 2000, 1000 бит/сек. |
| РТС-9БИТС-2Ц | КИМ-ЧМ | 521000, 256000, 128000, 64000, 32000, 16000, 8000, 4000, 2000, 1000, 500 бит/сек. зависит от типа бортовой аппаратуры и соответствует частоте следования опорных импульсов 6 кГц. |
1.2.1. Наведение антенны и сопровождение КА по азимуту и углу песта в режимах ручного, программного наведения, автоматического сопровождения и др.
1.2.3. Предельные углы наведения антенны в режиме автосопровождения составляют по углу места от 0° до 108° и по азимуту ±270°
1.2.4. Скорости сопровождения КА:
минимальные:
по углу места - 1,8 мин/с,
по азимуту - 3,0 мин/с,
максимальные:
по углу места - 3,5 град/с,
по азимуту - 6 град/с.
1.2.5. Запоминание и последующее воспроизведение полного объема принимаемой информации на магнитную ленту.
1.2.6. Открытую графическую регистрацию телеметрической информации о сигнальных и функциональных параметрах на электрохимическую бумагу.
1.2.7. Регистрацию информации в режиме телесигнализации в виде табулограммы с помощью цифропечатающего устройства МПУ-16-2.
1.2.8. Визуальное отображение телеметрической информации на экране электроннолучевой трубки.
1.2.9. Выдачу телеметрической информации в виде частотно-уплотненного сигнала по одному коаксиальному кабелю на расстояние до двух километров на аналогичную аппаратуру с записью на магнитные запоминающие устройства и на устройства графической регистрации, а также для ввода информации в аппаратуру КАО и в аппаратуру ВШК.
1.2.10. Контроль технического состояния аппаратуры и качества принимаемой информации путей измерения и регистрации наиболее важных параметров, характеризующих работу системы.
1.2.11. Время подготовки аппаратуры к работе не более 30 минут. Максимальное время перехода с одного КА на другой не превышает 30 минут. Время перехода с режима работ ВИМ-АМ на режим КИМ-ЧМ и с одной рабочей частоты на другую в пределах диапазона волн не более 5 мин, включая контроль работоспособности. Время непрерывной работы 16 часов с последующим 4‑часовым перерывом.
Питание аппаратуры осуществляется трехфазным напряжением 380/220 В частотой 50 Гц, потребление для аппаратуры Б-529М не превышает 40 кВт, для аппаратуры УРТС-2-10 кBт на один комплект.
Ресурс работы приемно-регистрирующей аппаратуры составляет 10000 часов (антенной установки - 3000 часов), срок хранения аппаратуры - 10 лет.
1.3. Структура групповых телеметрических сигналов
Структура групповых телеметрических сигналов определяется типом бортовой аппаратуры. Рассмотрим наиболее характерные структуры сигналов для режимов РТС-9 КИМ-Ц, РТС-9 КИМ-А, РТС‑9 ВИМ и "Трал" - ВИМ.
1.3.1. Структура группового телеметрического видеосигнала в режиме РТС-9КИМ-Ц представляет собой последовательность импульсов, которая разбивается на кадры (рис.2).
Кадр делится на слова, число посылок в каждом слове 10, из которых первые 9 посылок представляют собой разряды двоичного кода информации. Десятая посылка содержит символ четности, который дополняет число единичных символов в информационных посылках до четного.

рис.2. Структура сигнала в режиме РТС-9 КИМ-Ц.
При приеме информации, воспроизводимой с бортового ЗУ, в кадр вводятся "холостые" слова, представляющие собой кодовые группы, содержащие 10 нулевых символов. Передача "холостых" слов необходима для компенсации нестабильностей при считывании информации бортового ЗУ.
В информационных словах отсутствуют кодовые группы, в которых все 10 символов являются единицами или нулями. При этом нулевой уровень измерений (0% шкалы) передается числом 7-75, а максимальный уровень (100% шкалы) - числом 430-500. Предельные значения двоичного кода измерений используются для передачи сигналов перегрузки по минимальному (1000000001) и максимальному (0111111110) уровням.
Для передачи информации о сигнальных параметрах и другой цифровой информации в слове используются 8 разрядов - со 2-го по 9-й, причем в каждом из этих разрядов передается информация о состоянии одного контактного датчика.
Информация о сигнальных параметрах может передаваться методом амплитудного уплотнения четырех контактных датчиков в одном измерительном канале.
Необходимая служебная информация (командное слово, сигналы калибровки и сигналы бортового времени) передаются с помощью информационных слов. Командное слово передается в первом измерительном канале и несет информацию о режимах работы бортового ЗУ и вариантах запараллеливания основного коммутатора. Передача сигналов калибровки осуществляется по каналам локальных коммутаторов:
уровень 0% по каналу 29 (ЛК32) или каналу 61 (ЛК 64);
уровень 50% по каналу 13 (ЛК32) или каналу 45 (ЛК 64)
уровень 100% по каналу 14 (ЛК32) или каналу 46 (ЛК 64)
Сигналы бортового времени передаются по 2, 3 и 4 каналам любого локального коммутатора в виде 17 - разрядного двоичного кода астрономического времени (6 разрядов - секунды, 6 разрядов - минуты, 5 разрядов - часы), либо отметок времени идущих в прямом счете до величины 217.
1.3.2. В режиме РТС-9 КИМ-А последовательность двоичных сигналов разбивается на псевдокадры. Псевдокадр состоит из 2 частей: служебной и информационной (рис.3).

рис. 3 Структура группового телеметрического сигнала в режиме РТС-9 КИМ-А.
Служебная часть псевдокадра включает синхрослово, командное слово, тестовое слово и синхропосылку ЗАС. Синхрослово фиксирует начало псевдокадра и представляет собой М-последовательность вида 1111000110111010000100101100 (31 символ). Командное слово передается помехоустойчивым кодом. Оно состоит из 15 или 30 символов, из которых 4 или 8 символа - информационные и содержат сведения о структуре псевдокадра.
Тестовое слово состоит из 8 символов. Оно несет информацию об условном номере КА.
Синхропосылка ЗАС длиной в 256 символов служит для синхронизации бортовой и наземной аппаратуры ЗАС, обеспечивающей засекречивание передаваемой телеметрической информации.
Служебная часть псевдокадра должна быть известна заранее.
Её изменение в сеансе связи, кроме командного слова, не допускается.
Информационная часть псевдокадра включает адресные и информационные слова. В псевдокадре могут передаваться слова различной длины. Число посылок в адресном слове может составлять 0-10 символов, в информационном слове – 4-16 символов. При индивидуальной адресации каждое информационное слово сопровождается своим адресным словом. При групповой адресации один адрес относится к группе (не более 64) информационных слов. В пределах псевдокадра допускается применение любого вида адресации, включая безадресную передачу измерений.
Структура сигналов бортового времени определяется режимом работы бортовой аппаратуры, т.е. режимом телеизмерений или режимом телесигнализации. В режиме ТИ передача информации текущего времени псевдокадра осуществляется в начале информационной части с помощью информационных слов. Для этого посылка времени, состоящая из 21 значащего разряда, разбивается на группы в соответствии с длиной слов, принятой для данного псевдокадра. В составе посылки времени передаются два маркерных сигнала, служащие для выдачи меток времени на регистрации. Время событий в режиме ТС передается в виде 17-разрядной посылки, следующей непосредственно за адресом этого события (рис.4).
Структура информационной части псевдокадра может изменяться во время сеанса связи. Переход аппаратуры нормализации сигнала ТУ-630М2 на новую структуру псевдокадра производится автоматически по командному слову.

Рис. 4. Структура информационно-адресных слов в режиме РТС-9 КИМ-А.
1.3.3. Групповой телеметрический сигнал в режиме РТС-9 ВИМ представляет собой последовательность опорных и измерительных импульсов (рис.5).

рис. 5 Структура группового телеметрического сигнала в режиме РТС-9 ВИМ.
Опорные импульсы передаются с постоянной частотой, определяемой информативностью бортовой аппаратуры, и располагаются друг от друга на постоянных временных интервалах (канальные интервалы). Временное положение измерительных импульсов относительно опорных пропорционально измеренному текущему значению параметров.
Начало цикла коммутации основного коммутатора (коммутатор первой ступени) фиксируется маркером основного коммутатора.
Признаком МОК является отсутствие измерительного импульса в канальном интервале.
За цикл основного коммутатора в системе передается информация о семи локальных коммутаторах (коммутаторы второй ступени).
Коммутатор второй ступени может иметь 32 (ЛК32) или 64 (ЛК64) входа (канала).
В режиме РТС-9 ВИМ реализована синхронная и несинфазная схема коммутации, поэтому возникает необходимость передавать маркеры локальных коммутаторов. Информация о МЛК передается в виде отрицательных уровней напряжения в трех последовательных каналах: 30, 31 и 32 для ЛК32 и 62, 63 и 64 для ЛК64. В структуре ВИМ-сигналов это соответствует передаче импульса в первом защитном интервале.
Информация бортового времени передается по первому каналу любого коммутатора второй ступени или по первому каналу коммутатора ЛК-32 и ЛК-64 при информативности бортовой аппаратуры 3200 изм/с. Сигналы бортового времени могут кодировать метки времени 1 с, 10 с, 1 мин, 10 мин. Датчик времени бортовой аппаратуры формирует код времени и промежуточные метки, число рабочих разрядов кода - 10, число служебных разрядов (маркер М1,М2)-2. Каждый разряд кода времени передается одним измерением. Промежуточные метки передаются не менее, чем тремя измерениями.
1.3.4. Групповой телеметрический сигнал системы "Трал" (режим "Трал" - ВИМ) состоит из последовательности следующих импульсов (рис.6):
- опорные импульсы с периодом повторения 166,6 мкс;
- импульсы калибровки "Уровень 0%" и "Уровень 100%", которые передаются последовательно по каждому каналу через равные промежутки времени. Передача сигналов калибровки отмечается маркером в соответствующем измерительном канале. Калибровка измерительных каналов производится последовательной подачей на вход канала напряжений 0% и 100% шкалы измерений;

рис. 6 Структура группового телеметрического сигнала в режиме «Трал»-ВИМ.
- измерительные импульсы, расположенные в измерительных интервалах. Положение измерительного импульса относительно опорного импульса пропорционально контролируемой величине и может изменяться в пределах от 24 до 96 мкс;
- маркерные импульсы M125 (маркер цикла) отмечают начало каждого цикла измерений и представляют собой группу из трех импульсов. Каждый цикл измерений разбит на 4 части (группы). Начало каждой группы отмечается маркером М500 в виде четырех импульсов. Маркеры M125 и М500 передаются во втором защитном интервале;
- импульсы контактных датчиков, расположенные во втором защитном интервале всех каналов, исключая каналы, содержащие маркеры M125 и М500.
В некоторых вариантах бортовой аппаратуры системы "Трал" предусмотрена возможность передачи информации о состоянии КД в первом защитном (дошкальном) интервале. Возможна также передача информации о состоянии КД методом амплитудного уплотнения сигналов четырех КД в одном измерительном канале.
Служебная информация о работе программно-коммутирующих устройств (маркер ПКУ, чётная ламель ПКУ, нечетная ламель ПКУ) передается в первом измерительном канале (для бортового устройства "Трал-П1") или во втором защитном интервале по каналам КД (для бортового устройства "Трал-П2").
Информация о сигналах бортового времени передается по каналам КД в виде оцифрованных или неоцифрованных меток времени в зависимости от типа бортового ЗУ и режима его работы.
1.3.5. Структура группового телеметрического видеосигнала в режиме БИТС-2Ц
Режим БИТС-2Ц - входной видеосигнал представляет собой последовательность двоичных символов и включающий в себя служебную и измерительную информацию (структура видеосигнала приведена на рис. 7).
Устанавливаются следующие скорости передачи информации: 512000, 255000, 64000, 32000, 16000, 8000, 4000, 2000, 1000 дв.ед/сек.
Количество символов в кадре должно быть кратно 10 и составляет не более 5430 символов. Для каждого конкретного объекта структура служебной части и длина кадра неизменны.

Служебная часть кадра передается в начале кадра и включает в себя следующие посылки:
- один свободный разряд (для кратности 10 служебной части кадра)
- cинхропосылку длиной 31 символ;
- командное слово длиной 30 символов;
- тест-слово длиной 8 символов;
- синхропосылку ЗАКР длиной 240 символов.
Синхропосылка представляет собой n-последовательность вида:
111110011011101010000100101100.
Командное слово состоит из двух модулей, каждой из которых содержит 4 информационных и 11 проверочных символов.
Тестовое слово состоит из 8 символов и содержит информацию о номере телеметрического объекта.
В случае выключения аппаратуры криптозащиты вместо синхропосылки ЗАКР должен передаваться сигнал типа "меандр".
При отсутствии необходимости синхропосылки ЗАКР она может бить исключена из служебной части кадра, а ее длина соответственно уменьшается.
Информационная часть кадра состоит из слов. Количество слов в кадре - 512, длина слова - 10 символов.
Слова передаются старшим разрядом вперед.
Десятый символ слова - символ четности.
Положение отдельных каналов (слов) в кадре заранее известно.
В структуре кадра предусмотрена возможность запараллеливания отдельных позиции кадра. Запараллеливание осуществляется через равное число позиции в кадре кратное 2, количество и состав запараллеленных позиций не ограничивается и оговаривается в программе измерений.
В системе предусмотрена возможность субкоммутации. Субкадры могут быть образованы на любой позиции кадра.
Количество каналов субкадра может быть 2, 4, 8, 16, 32, 64, 128, 256.
Длина всех субкадров одинакова.
Синхронизация всех субкадров осуществляется с помощью одного специального синхроканала. Синхроканал образуется в одной из позиций кадра. В нем передается порядковый номер каналов субкадра.
На первой позиции кадра передается командное слово. На 512-ой позиции передается кадровое слово, состоящее из 10 ''единиц" кода.
Возможны следующие режимы передачи информации: НП, ЗАП, ВОСПР (прямой и обратный).
При организации режима "ВОСПР' для компенсации несоответствия (нестабильности) скоростей передачи и воспроизведения ЗУ допускается передавать холостые кадры (сигнал типа "Меандр" в информационной части кадра).
Признак холостого кадра отражается в командном слове.
2. AHTEННO-ПРИЕМНАЯ СИСТЕМА Б-529М
2.1. Назначение антенно-приемной системы
Антенно-приемная система Б-529М предназначена для приема и выделения телеметрических радиосигналов бортовых устройств радиотелеметрических систем "РТС-9" и "Трал" с сигналами ВИМ‑АМ и КИМ-ЧМ. Система позволяет принимать сигналы при автоматическом сопровождении объекта по направлению на 42 фиксированных частотах в метровом и 136 фиксированных частотах - в дециметровом диапазонах волн, причем при изменении скорости передачи информации в диапазоне от 500 до 512000 бит/с осуществляется изменение полосы приемных устройств в соответствии с изменением длительности символа.
Телеметрический видеосигнал с выхода антенно-приемной системы Б-529М подается через блоки сопряжения ТУ-569 на унифицированные радиотелеметрические станции УРТС-2 через коммутирующее устройство ТУ-640. Кроме того, АПС Б-529М может быть сопряжена с регистрирующей аппаратурой станций МА-9МК, "Трал". Состав АПС (рис.7) приведен в разделе 1.1.

рис. 7 Структурная схема антенно-приемной системы.
2.2. Принцип действия антенной системы
Антенная система CM-178 обеспечивает прием сигналов в метровом и дециметровом диапазонах волн при произвольной поляризации электромагнитной волны.
Система состоит из четырех параболических зеркал диаметром 6 м с разнесенными фазовыми центрами (рис.8).
Зеркала размещены на ОПУ CM-175, обеспечивающем их поворот в направлении КА. Для определения направления на объект применяется моноимпульсный метод с образованием суммарного и разностного сигналов для азимутальной и угломестной плоскостей пеленгации. Достоинством суммарно-разностной системы является независимость равносигнального направления от паразитного набега фаз в каналах.
Эффективная площадь антенны по суммарному каналу составляет не менее 20 м2 в метровом и 25 м2 в дециметровом диапазонах волн. Ширина суммарной диаграммы составляет 2,5° - 3° в дециметровом и 7,5° - 12° в двух участках метрового диапазона. Максимальные ошибки сопровождения при скорости ветра 20 м/с не превышают по углу места и азимуту 30 угл.мин. Используемые излучатели антенн и фидеры обеспечивают прием сигналов в широкой полосе частот. Коэффициент перекрытия по частоте равен 7, что позволяет принимать сигналы всех рабочих частот метрового и дециметрового диапазонов.
Прием сигналов в широкой полосе частот достигается применением широкополосных излучателей, выполненных по принципу логопериодической структуры. В антенне используются четыре взаимноортогональных широкополосных логопериодических излучателя, позволяющих принимать сигналы с вертикальной, горизонтальной и произвольной поляризацией электромагнитной волны (рис.8). Сигналы с горизонтально поляризованных элементов излучателей и отдельно сигналы с вертикально поляризованных элементов излучателей поступают на высокочастотные гибридные мосты формирования суммарной и разностной диаграмм (блок Б-557). Используются два вида собранных по одинаковой схеме и отличающихся геометрическими размерами гибридных мостов: один - для метрового и другой - для дециметрового диапазонов. Мосты служат для образования суммы и разности поступающих на их входы сигналов. Благодаря этому на выходе блока Б-557 образуются сигналы суммарные для горизонтальной и вертикальной - U∑г, U∑в поляризации, а также разностные для азимутальной UΔaг, UΔaв и угломестной UΔβг, UΔβв. Таким образом, получаются суммарная и разностная диаграммы направленности системы антенна - схема формирования диаграмм.

рис. 8 Схема фазовых центров. рис.9 Вид суммарной и разностной диаграмм направленности.
Примерный вид суммарной и разностной диаграмм приведен на рис.9. На направлении оси антенны (α=β=0) разностный сигнал равен нулю, а суммарный максимален. При отклонении объекта от равносигнального направления амплитуда сигнала в разностном канале характеризует величину, а фаза по отношению к фазе суммарного канала - сторону отклонения. Сигнал разностного канала используется в сервоприводе CM-175 для доворота оси антенны по соответствующей угловой координате на объект.
2.3. Приемно-пеленгационная аппаратура
Для реализации моноимпульсного метода пеленгации необходим трехканальный усилительный тракт сигналов одной поляризации: суммарного сигнала, азимутального и угломестного разностных сигналов. При этом амплитудные, частотные и фазовые характеристики усилителей во всех режимах должны быть идентичными. Heидентичность характеристик приводит к появлению ошибок пеленгации и сопровождения объекта.
Стремление упростить приемные устройства привело к отказу от чисто моноимпульсного метода. В системе используется псевдоимпульсный метод с одним каналом в приемнике, в котором одновременно усиливаются как суммарный, так и разностные сигналы. Идея одновременного усиления трех сигналов в одном канале состоит в следующем. Суммарный сигнал U∑ (рис.10) складывается с манипулированными по фазе сигналами ошибки ±UΔ разностных каналов. Результирующий сигнал Uрез., получившийся при сложении, усиливается одноканальным приемником, на выходе которого сигнал ошибки может быть выделен фильтрами, настроенными на частоту манипуляции. Амплитуда этого сигнала содержит сведения о величине, а фаза - о стороне отклонения объекта от оси антенны.
В состав приемно-пеленгационной аппаратуры входят приемная аппаратура метрового и двух дециметровых диапазонов волн, в которых суммарные и разностные сигналы горизонтальной и вертикальной поляризации усиливаются отдельными усилителями.
С выхода схемы формирования диаграмм Б-557 сигналы поступают на вход приемно-пелангационной аппаратуры ТУ-544. Здесь усиление и преобразование сигналов дециметрового и метрового диапазонов волн производятся в двух принципиально не отличающихся каналах. Поэтому для уяснения принципа работы остановимся на описании дециметрового канала.
Суммарный сигнал в фазовом манипуляторе складывается с манипулированными по фазе частотами 170 Гц и 270 Гц сигналами разностных (азимутального и угломестного) каналов (рис.11). Результирующий сигнал усиливается и после двойного преобразования частоты поступает в приемник информационного сигнала и приемник выделения сигналов ошибки. Для выделения сигналов ошибки в пеленгационном приемнике в качестве опорных используются сигналы генератора опорного напряжения. Рассмотрим более детальную структурную схему приема информационных сигналов и выделения сигналов ошибки пеленгации (рис.13).
Суммарный и разностные сигналы с выхода схемы формирования суммарной и разностной диаграмм Б-557 поступают на фазовый манипулятор ЧУ-503. В манипуляторе осуществляется фазовая манипуляция аналоговых ВИМ-АМ или цифровых высокочастотных сигналов азимутального и угломестного разностных каналов (рис.10).

рис. 10 Диаграммы, поясняющие сложения суммарного и разностного сигналов для усиления в одном канале.
После сложения фазоманипулированных разностных и суммарного сигналов получается результирующий сигнал с амплитудной манипуляцией. Глубина амплитудной манипуляции результирующего сигнала определяется величиной отклонения объекта от оси антенны, а фаза огибающей говорит о стороне отклонения (рис.10). Перед сложением разностные сигналы ослабляются, поэтому глубина модуляции суммарного сигнала при максимально возможных ошибках сопровождения не превышает 0,5-1,0%.
Таким образом, в результирующем сигнале на выходе фазовых манипуляторов содержится телеметрическая информация и сигнал ошибки пеленгации.
Особенностью тракта усиления является использование параметрических усилителей ТУ-908М и включенных за ними малошумящих широкополосных усилителей ЧУ-504 и ТУ-565. Параметрический усилитель первого дециметрового диапазона имеет полосу 26 МГц и коэффициент усиления 24 дБ, а второго - полосу 50 МГц и коэффициент усиления 27 дБ. Коэффициент шума не превышает двух.
Приемное устройство в целом имеет чувствительность в метровом диапазоне, изменяющуюся от -116 дБ/Вт (для ВИМ) до -153 дБ/Вт (для КИМ-11 при 500 бит/с), и в дециметровом диапазоне от –121 дБ/Вт до -158 дБ/Вт для тех же условий.
После предварительного усиления параметрическим и малошумящим широкополосным усилителем в усилителе-преобразователе ЧУ-502, ТУ-576 осуществляется первое преобразование частоты. В результате преобразования получаются сигналы первой промежуточной частоты (fпр1 ~70 МГц) для каналов горизонтальной и отдельно вертикальной поляризации.

рис. 11 Структурная схема одного канала приемно-пеленгационной аппаратуры.
После второго преобразования частоты в блоке ТУ-581 эти сигналы поступают в приемник телеметрических сигналов ТУ-514 и приемник выделения сигнала ошибки пеленгации ТУ-595 (fпр2 ~25 МГц)

рис. 12 Программное устройство.
Полоса приемника ТУ-514 изменяется в соответствии со скоростью передачи информации. В приемнике осуществляется частотная автоподстройка путем изменения частоты первого гетеродина. Это позволяет исключить доплеровское смещение частоты и сузить полосу пропускания приемника.
Система АРУ поддерживает изменение усиления каналов вертикальной и горизонтальной поляризации на более 2 дБ. Динамический диапазон АРУ не менее 60 дБ.
В выходных каскадах приемника осуществляется детектирование амплитудно (для ВИМ-АМ) или частотно (для КИМ-ЧМ) манипулированных сигналов.
Выходные сигналы приемных каналов вертикальной и горизонтальной поляризацией сравниваются по величине отношения сигнал/шум и на выход приемника выдается сигнал с лучшим отношением. Если же отношения сигнал/шум каналов с вертикальной и горизонтальной поляризацией оказывается одинаковый, то на выход приемника выдается суммарный сигнал каналов.
В состав аппаратуры входят панорамные приемники ТУ-513, на вход которых подаются сигналы второй промежуточной частоты 25 МГц. Они предназначены для просмотра спектра принимаемого сигнала в полосе 0,015-4 МГц по двум каналам. Полосы обзора и полосы сканирующих фильтров приемника ТУ-513 сменные.
В блоке ТУ-581 пеленгационного канала производится усиление и преобразование частоты сигналов (fпр2 ~25 МГц), в блоке ТУ-595 - выделение сигналов ошибки сопровождения объекта.
Выделение сигнала ошибки осуществляется после третьего преобразования частоты (fпр3 ~5,25 МГц). Напомним, что сигналы в канале пеленгации представляют собой последовательности импульсов, модулированные по амплитуде меандрами с частотами 170 и 270 Гц (рис.10). В блоке ТУ-595 происходит амплитудное детектирование последовательности импульсов и разделение с помощью разделительных фильтров сигналов 170 Гц и 270 Гц. Получение сигналов ошибки происходит в фазовых детекторах, где в качестве опорных используются сигналы генератора опорного напряжения.

рис. 13 Структурная схема каналов приема информационных и пеленгационных сигналов.
Сигналы ошибки сопровождения ±UΔαr и ±UΔβr выходов фазовых детекторов подаются в систему управления опорно-поворотного устройства CM-175. При этом в блоке ТУ-595 производится преобразование сигналов ошибки в переменные напряжения 400 Гц, которые используются в качестве управляющих сигналов.
Контроль работы приемо-пеленгационной аппаратуры осуществляется по следующий параметрам: сигнала АРУ, отношение сигнал/шум каналов В и Г, отношение сигнал/шум суммы каналов В и Г. Эти параметры преобразуются в восьмиразрядный двоичный код аналого-цифровым преобразователем ТУ-620 и регистрируются на магнитных регистраторах, а также поступают на визуальные индикаторы.
2.4. Имитатор сигналов
Имитатор сигналов ИМД-1 предназначен для проверки работоспособности и контроля основных характеристик антенно-приемной системы Б-529М в метровом и дециметровом диапазонах.
Имитатор выдает высокочастотный калиброванный по мощности сигнал интенсивностью 10-4÷10-14 Вт. Диапазон сигнала 160 дБ может изменяться уровнями через 1 дБ.
Высокочастотный сигнал имитатора модулируется групповым телеметрическим видеосигналом в структурах систем "Трал" и PTC-9. При этом в цифровом режиме можно имитировать 11 градаций информативности от 500 до 512000 бит/с.
Установка несущих частот осуществляется по калибратору с погрешностью, не превышающей ±5*10-5. Возможна перестройка любой несущей частоты в пределах ±250 кГц.
В состав имитатора входит поляризатор, который используется для контроля работы схемы автовыбора сигналов вертикальной или горизонтальной поляризации в приемнике ТУ-514. Сигналы имитатора подводятся либо к контрольной антенне, расположенной на вышке "Унжа-2", либо непосредственно на входы приемных устройств метрового и дециметрового диапазонов.
2.5. Программное устройство
Программное устройство "Аккорд" предназначено для формирования сигналов, поступающих в систему управления опорно-поворотного устройства CM-175 и обеспечивающих сопровождение КА по заранее рассчитанной программе. Ошибка воспроизведения программы не превышает 0,15°. Программа управления рассчитывается и набивается на ЭВМ. Она вводится в программное устройство в виде стандартной перфоленты шириной 17,5 мм одновременно и независимо через два ФСУ, один из которых является резервным (рис.12). На перфоленте в двоичном коде заложена информация об угловых скоростях движения антенны по азимуту и углу места.
Фотосчитывающее устройство ВУ-157-11 представляет собой автоматический телеграфный передатчик, с помощью которого записанные на перфоленте комбинации превращаются в световые, а затем в электрические сигналы. В линейном интерполяторе ВУ-157-10 эти сигналы преобразуются в угловой поворот вала сельсин-датчика. Сигналы сельсин-датчика сравниваются в системе управления антенной с сигналами сельсинов обратного контроля, усиливаются и поступают в электропривод опорно-поворотного устройства, которое изменяет положение зеркала антенны в соответствии с программой.
В устройстве предусмотрена возможность ручной коррекции программы.
При возникновении сбоев в работе ФСУ или интерполятора переход с одного полукомплекта аппаратуры на другой осуществляется автоматически по команде "авария" или вручную.
Исправность аппаратуры проверяется по контрольной программе-тесту, которая содержит все элементы реальной рабочей программы. Контрольная перфолента изготавливается на аппаратуре СТА-М67 с использованием таблицы контрольных тестов. Всего имеется три тест-программы.
2.6. Опорно-поворотное устройство
Опорно-поворотное устройство CM-175 предназначено для углового перемещения зеркала антенны в направлении на космический аппарат.
Основными элементами ОПУ CM-175 является азимутальный и угломестный редукторы, приводимые в действие от исполнительных двигателей.
Исполнительные двигатели привода ОПУ запитываются от электромашинных усилителей ЭМУ-72А, усиливающих сигнал ошибки, получаемый от системы управления антенной.
Для снятия и выдачи в систему управления сигналов об угловом положении осей поворотного устройства используются сельсины обратного контроля, установленные в ОПУ.
3. УНИФИЦИРОВАННАЯ РАДИОТЕЛЕМЕТРИЧЕСКАЯ СТАНЦИЯ УРТС-2
3.1. Назначение и состав станции
Станция УРТС-2 предназначена для преобразования групповых телеметрических видеосигналов, поступающих с антанно-приемной системы Б-529М, регистрации и отображения выделенной телеметрической информации и выдачи этой информации в аппаратуру обработки и трансляции КАО, ВШК. Прием и регистрация информации выполняется как без применения, так и с применением аппаратуры засекречивания, для чего УРТС-2 сопрягается с наземной аппаратурой ЗАС (11Н972).
Состав УРТС-2 (рис.14, 16) приведен в подразделе 1.1.
Устройства, входящие в состав УРТС-2, выполняют следующие функции.
3.1.1. Аппаратура синхронизации и первичной регистрации обеспечивает:
- выделение синхросигналов и измерительных сигналов;
- запись на магнитную ленту выделенных измерительных и синхросигналов, сигналов СЕВ, а также команд управления, определяющих режим работы бортовой аппаратуры;
- воспроизведение с магнитного запоминающего устройства зарегистрированных данных;
- формирование и выдачу потребителям сигналов синхронизации и служебной информации;
- выдачу всего объема измерительной и служебной информации внешним потребителям;
- формирование сигналов наземного времени с оцифровкой меток времени;
- сбор информации служебной телеметрии и формирование сигналов на запись её в МЗУ и выдачу на стойку ТУ630М2;
- вырабатывает групповые телеметрические сигналы, поступающие на вход аппаратуры АСПР и на имитатор ИМД-1 для модуляции высокочастотного генератора.

1. - входной сигнал с приемников, 2. – сигналы СЕВ,
3. – выходной код на имитатор ИМД, 4. – связь со 2-м комплектом УРТС-2
рис. 14 Структурная схема УРТС-2
3.1.2. Аппаратура нормализации сигнала ТУ630М2 обеспечивает:
- преобразование группового телеметрического сигнала, имеющего циклическую или адресную структуру, в стандартную адресную структуру. При этом информационному и служебному слову, независимо от структуры, по заданной программе присваивается определенный адрес;
- прием командного слова, его анализ и формирование сигналов управления режимами регистрации;
- выделение кода бортового времени, анализ достоверности временной информации и формирование двоично-десятичного кода для графического регистратора ГУ-1;
- адресацию, временную привязку и выдачу на графическое устройство информации служебной телеметрии;
- управление работой графических устройств.
3.1.3. Графические регистраторы ГУ-1 предназначены для открытой регистрации части принятой телеметрической информации и сигналов калибровки с привязкой ко времени. Число регистрируемых на одном графическом регистраторе параметров не превышает 16. Запись информации осуществляется на электрохимическую бумагу ЭХБИ-200.
3.1.4. Аппаратура цифропечати ТУ-633М предназначена для печати данных телесигнализации в виде десятичных чисел и контроля верности ввода программ в аппаратуру ТУ-630М2. Регистрация данных осуществляется на бумажной ленте с помощью цифропечатающего устройства МПУ-16-2.
3.1.5. Устройство визуального наблюдения ТУ-626М предназначено для наглядного отображения величины телеметрических параметров в виде столбиков на экране электронно-лучевого индикатора. Высота столбиков пропорциональна величине параметров.
3.1.6. Пульт управления и контроля ТУ-627 обеспечивает управление режимами работы аппаратуры, обмен информацией между двумя комплектами УРТС-2, контроль функционирования блоков и стоек, а также индикацию текущего времени, уровня АРУ, соотношения сигнал/шум, параметра "качество".
3.1.7. Перфонабиватель ПЛ-80 предназначен для ручной подготовки перфолент с программами графической регистрации с целью последующего ввода в ТУ-630М2.
3.2. Структурная схема станции
3.2.1. Структурная схема УРТС-2 приведена на рис.14. На вход аппаратуры поступает сигнал с выхода приемных устройств через коммутатор ТУ-640 или частотно-уплотненный сигнал с выхода блока ТУ-622-06 другой УРТС-2. В соответствии с этим независимо от структуры принимаемых сигналов возможны три режима работы аппаратуры: запись, прием с линии и воспроизведение, когда входными являются сигналы, воспроизводимые с магнитного регистратора.
3.2.2. Прием, преобразование и первичная регистрация информации осуществляется аппаратурой АСПР. При записи информации в структурах КИМ-А и КИМ-Ц в аппаратуре АСПР производится принятие решения о значении символов ("0" или "1") и оценка достоверности принятого решения, выделение символьных (тактовых) синхроимпульсов, синхроимпульсов слов, синхроимпульсов основного и локальных коммутаторов, преобразование последовательного кода в параллельный и запись выделенной информации на магнитном регистраторе 17C06-07. При этом АСПР может работать совместно с аппаратурой декодирования засекреченной информации. Нахождение участков засекреченной информации производится на основе анализа бортовых команд.
Прием сигналов в коде ВИМ завершается преобразованием аналоговых сигналов в девятиразрядный код и выделением различных синхросигналов: опорных, основных кадровых, локальных кадровых при режиме РТС-9 и опорных, маркеров калибровки, маркеров М125, М500 при режиме "Трал".
Во всех режимах, кроме перечисленных сигналов, записываются коды служебной телеметрии, коды команд, времени и служебные сигналы.
В АСПР применяется четыре вида записи информации в МЗУ:
- истинными словами в параллельном коде без дублирования (в режиме ВИМ, КИМ-Ц);
- условными восьми- или десятиразрядными словами в параллельном коде без дублирования (в КИМ-А);
- условными словами с дублированием для информативностей не более 32 тыс. дв.ед. в сек;
- запись с помехоустойчивым кодированием.
При первом виде записи на отдельных дорожках магнитной ленты записываются девять разрядов информации, символ четности, синхроимпульсы слов, синхроимпульсы основного и локального коммутаторов. Эти сигналы представляют собой параллельный код. Кроме того, на отдельных дорожках записывается код служебной телеметрии, время, код наземных команд и квитанций об их исполнении, звук и другая информация. Всего для записи используются 20 дорожек.
При втором виде записи массив информации в виде последовательного кода преобразуется в восьми- или десятиразрядные условные слова параллельного кода. Затем каждый разряд параллельного кода записывается на отдельной дорожке МЗУ.
Третий вид записи значительно отличается от первых двух.
Здесь информация записывается в последовательном коде.
Вместо параллельного кода записывается код "1" и тактовые синхроимпульсы на пяти параллельных дорожках.
На трех дорожках записывается признак недостоверности.
Шесть дорожек служат для записи кода служебной телеметрии, времени, бортовых команд, звука и служебной информации, одна дорожка не используется.
Независимо от режима и структуры записываемых сигналов в стойке синхронизации и кодирования информации ТУ-621 предусмотрена запись с помехоустойчивым кодированием, избыточным кодом 2,1, благодаря чему возможно обнаружение и исправление ошибок.
Этот режим повышает достоверность тракта запись-воспроизведение. Введение избыточности требует увеличения вдвое скорости протяжки магнитной ленты.
При приеме с линии информация записывается в виде любой из рассмотренных выше структур. Структура записи определяется режимом работы передающей УРТС-2.
В режиме воспроизведения выходной сигнал полностью соответствует записанному, если запись произведена истинными словами (запись ВИМ, Трал, КИМ-Ц). Если же запись была произведена условными словами или последовательным кодом с дублированием, то воспроизводимые сигналы преобразуются.
Условные слова преобразуются в последовательный код.
При воспроизведении сигналов, записанных с дублированием, выделение информационных символов и сигналов тактовой частоты производится по методу голосования. Сигнал считается достоверным при совпадении трех значений из пяти.
В АСПР формируются сигналы времени с отсчетом часов, минут и секунд в объеме одних суток. Отметки времени представляются 17-разрядным двоичным кодом для записи на МЗУ и 24-разрядным двоично-десятичным кодом для визуальных индикаторов времени и графических регистраторов. Предусмотрено также формирование суточного времени в режиме непрерывного счета секунд от условного заданного начала отсчета.
С АСПР на аппаратуру нормализации сигнала ТУ-630М2 поступают информационные сигналы, сигналы служебной телеметрии, синхросигналы, коды времени и команд.
3.2.3. Аппаратура нормализации сигнала ТУ-630М2 работает в трех режимах: "Программа", "Работа", "Контроль".
В режиме "Программа" в ТУ-630М2 вводится с перфосчитывателя СП-4П-Б программа регистрации данных на графическом устройстве ГУ-1. Ввод программы может осуществляться как с панели управления и индикации стойки ТУ-630М2, так и с пульта ТУ-627. В процессе ввода программы осуществляется контроль верности её введения. Результат контроля отображается на индикаторах или выдается в виде табулограммы с цифропечатающего устройства МПУ-16-2.
В режиме "Работа" осуществляется преобразование и выдача информации на регистрацию согласно введенной программе. При этом параметрам, подлежащим регистрации, присваиваются вторичные адреса, определяющие номер регистрирующего блока, признак калибровки, номер программы регистрации, признак окраски параметра и номер дорожки.
В устройстве управления регистратором производится декодирование вторичного адреса и распределение информации по регистрирующим блокам и дорожкам.
Переход с одной программы регистрации на другую осуществляется вручную либо по командному слову.
В процессе преобразования сигналов циклической структуры кодам измерений присваиваются первичные адреса, которые формируются подсчетом опорных импульсов.
Регистрируемая информация может быть привязана как к бортовому, так и к наземному времени. К наземному времени информация привязывается в режиме "НП". В этом режиме метками являются 0,1; 1; 10-секундные сигналы. Оцифровываются секундные метки.
К бортовому времени информация привязывается в режиме "ВП". При этом сигналы бортового времени выделяются из принятого кода и после контроля на достоверность подаются на регистратор.
В режиме "Контроль" проверяется работоспособность АНС.
Для этого используются специальные тестовые сигналы, результаты преобразования которых отображаются на индикаторах и с помощью цифропечатающего устройства МПУ-16-2 на бумажной ленте.
Имеется возможность изменить в процессе контроля величину напряжения питания и тем самым выявлять возможные неисправности в работе отдельных узлов.
3.2.4. Аппаратура цифропечати ТУ-633М обеспечивает регистрацию информации о бортовых событиях в режиме телесигнализации. Информация об адресе события регистрируется в десятичном коде. Время печатается в десятичном коде в ходе непрерывного счета секунд относительно НОВ либо в виде часов, минут и секунд московского времени.
Сопутствующий параметр (код измерений) печатается в десятичном коде либо в виде условных символов: "+", "-".
3.3. Аппаратура регистрации и отображения информации
В приемно-регистрирующей аппаратуре МА-9МКТМ-4 регистрация телеметрической информации осуществляется на магнитном регистраторе 17C06-07, графическом устройстве ГУ-1 и цифропечатающем устройстве МПУ-16-2. Отображение информации осуществляется на блоке визуального наблюдения ТУ-626М.
3.3.1. Устройство магнитной регистрации 17C06-07 обеспечивает запись и воспроизведение кода измерений, синхросигналов, а также сигналов звукового сопровождения. Запись информации осуществляется на магнитную ленту шириной 25,4 мм по 20 дорожкам. Скорость протяжки магнитной ленты при записи зависит от информативности бортовой аппаратуры и может составлять 0,125; 0,25; 0,5; 1,0 и 2,0 м/с.
Запись информации осуществляется методом "без возвращения в исходное состояние".
Структура регистрируемых на магнитную ленту сигналов определяется режимом работы системы.
В УРТС-2 предусмотрена возможность повышения достоверности информации в тракте магнитной записи. Это реализуется предварительным помехоустойчивым кодированием сигналов, подлежащих регистрации, с последующим обнаружением и коррекцией ошибок при воспроизведении сигналов. Возможен также режим регистрации информации с дублированием. При воспроизведении информации в этом режиме декодирование выполняется мажоритарным методом по правилу "3 из 5" (совпадение трех из пяти одних и тех же зарегистрированных сигналов).
Процесс регистрации информации можно контролировать с помощью встроенного осциллографа.
3.3.2. Аппаратура графической регистрации ГУ-1 обеспечивает открытую графическую регистрацию информации на электрохимическую бумагу в объеме 2, 4 или 8 функциональных параметров на одном графопостроителе в масштабе 1:1, 1:2, 1:4. Точность представления параметров при этом составляет 0,4%; 0,8% и 1,6% соответственно.
Максимальное число регистрируемых функциональных параметров 64.
Регистрация сигнальных параметров осуществляется группами от 8 до 32 показаний сигнальных датчиков.
Скорость движения бумажной ленты может изменяться диокретно от 1,5 мм/сек до 250 мм/сек.
Управление процессом регистрации задается программой и может изменяться с пульта управления ТУ-627 или по командному слову.
3.3.3. Аппаратура цифропечати ТУ-633М обеспечивает регистрацию информации на цифропечатающем устройстве МПУ-16-2 в режиме телесигнализации. Информация регистрируется на стандартной бумажной ленте в виде табулограммы по 16 знаков в одной строке. Запись сигналов осуществляется в виде десятичного кода или с помощью условных обозначений.
3.3.4. Отображение телеметрической информации во всех режимах работы осуществляется с помощью блока визуального наблюдения. В системе УРТС-2 используются блоки двух модификаций: БВН ТУ-626М и БВН ТУ-626-00М. Первый из этих блоков выполнен в виде переносного прибора с собственный источником питания. Блок второй модификации собственного источника питания не имеет и используется в составе стойки.
С помощью блоков визуального наблюдения обеспечивается контроль информации о сигнальных и функциональных параметрах. Имеется также возможность наблюдать структуру синхрослова псевдокадра в режиме РТС-9 КИМ-А.
Отображение информации осуществляется на экране электроннолучевой трубки. Причем информация о функциональных и сигнальных параметрах отображается в виде "столбиков", высота которых пропорциональна текущему значению контролируемых параметров. Максимальное число одновременно отображаемых параметров равно 64. Сигнальные параметры системы "Трал" отображаются по каждому КД в виде яркостных точек, расположенных ниже нулевого уровня измерительной шкалы. Сигнальные параметры системы РТС-9 отображаются группами по восемь КД в виде восьми точек, одна из которых расположена ниже нулевого уровня, а остальные семь выше нулевого уровня. Порядок отсчета номера КД снизу вверх.
Разряды синхрослова отображаются в виде "столбиков" максимальной высоты для единичных символов и точек на нулевом уровне для нулевых символов.
Сигналы, подаваемые для отображения на БВН, в режимах "Трал-ВИМ", РТС-9 ВИМ и РТС-9 КИМ-Ц поступают в структуре, принятой для записи на магнитный регистратор 17C06-07. В режиме РТС-9 КИМ-А на вход БВН сигналы подаются параллельным кодом в виде 5 разрядов адреса направления, 6 разрядов адреса измерительного канала и 7 разрядов информации.
Органы управления и устройства коммутации БВН обеспечивают возможность яркостного подсвета при контроле любого измерительного канала или группы каналов. Имеется также возможность подключения дополнительных БВН.
3.4. Управление и контроль работы аппаратуры МА-9МКТМ-4
Управление работой МА-9МКТМ-4 осуществляется программным методом и предусматривает:
- программу управления антенно-приемной системой Б-529М;
- программу команд управления режимами работы аппаратуры ТУ-544 и УРТС-2;
- программу декодирования структур групповых телеметрических сигналов, регистрации и отображения принимаемой информации.
Первая из указанных программ набивается на перфоленте в коде телеграфной аппаратуры СТА‑М67 и обеспечивает сопровождение КА по ранее рассчитанной траектории.
Вторая программа включает информацию о режиме работы аппаратуры, информативности бортовой аппаратуры, данные о структуре ПС, виде записи и скорости протяжки магнитного регистратора, режиме приема информации и режиме сопровождения объекта. Эта программа вводится на пульте контроля и управления ТУ-627.
Третья программа содержит информацию о порядке декодирования ГТС, номерах каналов, выводимых на графическую регистрацию и цифропечать. Эта программа набивается на бумажной ленте и вводится в аппаратуру нормализации сигнала ТУ-630М2 с помощью устройства ввода программ СП-4П-Б.
Управление аппаратурой МА-9МКТМ-4 и контроль её функционирования осуществляется дистанционно с пульта ТУ-627. Кроме дистанционного управления, аппаратура может управляться автономно. Разрешение на автономное управление выдается с пульта ТУ-627. Органы автономного управления расположены на лицевых панелях соответствующих стоек и блоков.
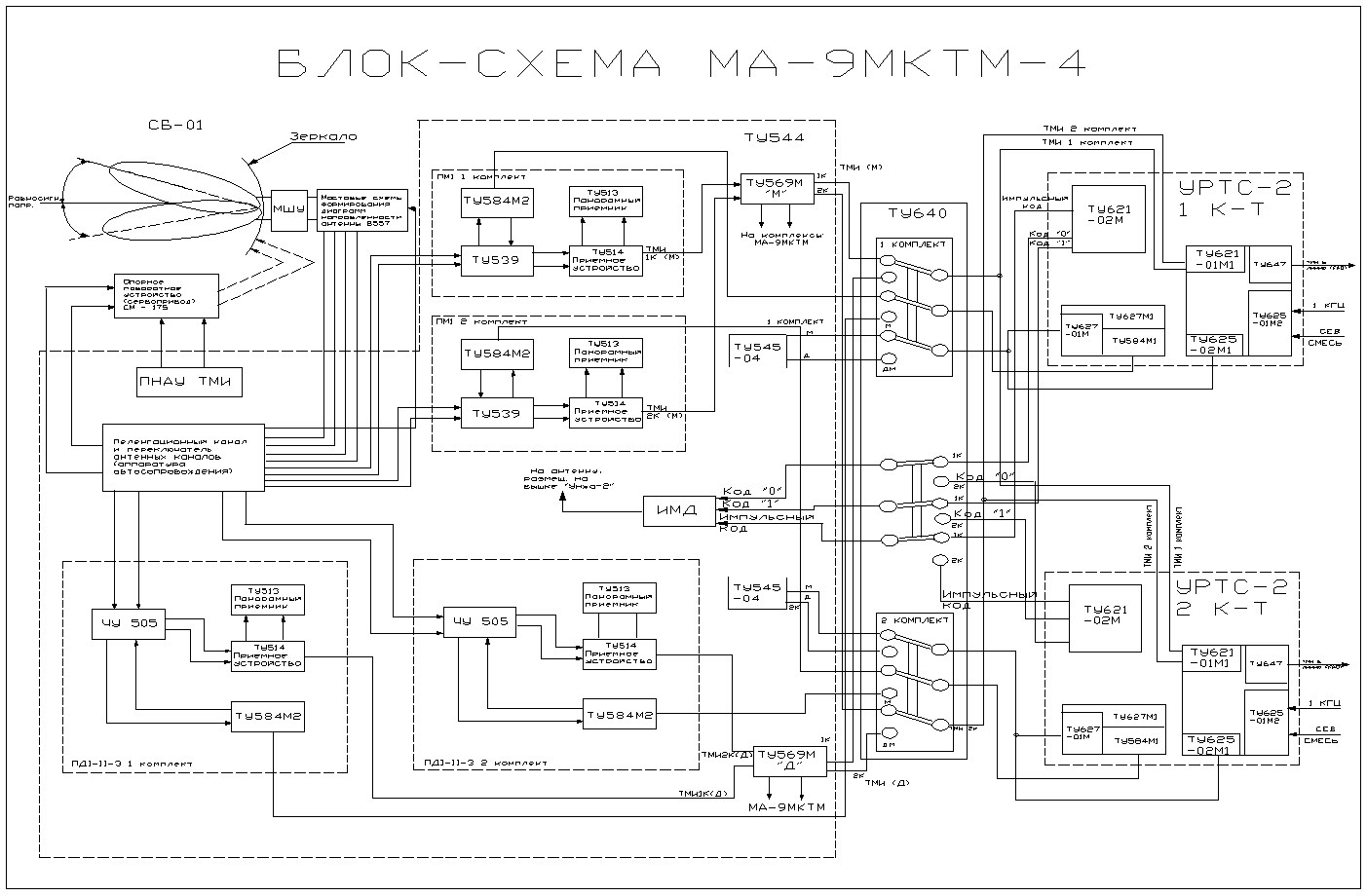
рис. 15 Блок-схема МА-9МКТМ-4
Другие учебные пособия по телеметрии: